

စနစ်အနှစ်ချုပ်
မရပ်မနား အလေးချိန်ထိန်းသည့်စနစ်သည် ပြုပြင်ထားသော လမ်းဘေးပိုလျှံနေသည့် ထောက်လှမ်းသည့်ဘူတာများအတွက် လုပ်ငန်းဆိုင်ရာ အသုံးချလုပ်ဆောင်ချက်များကို အဓိက ပံ့ပိုးပေးပါသည်။ ကုန်စည်ပို့ဆောင်ရေးယာဉ်များ၏ ထောက်လှမ်းမှုနှင့် အလေးချိန်ကို အပြီးသတ်ရန် အကြိုစစ်ဆေးရေးကိရိယာများကို မှီခိုအားထားကာ အဆက်အသွယ်မရှိသော ထိန်းကျောင်းမှုနည်းလမ်းများကို အဓိကအားဖြင့် လက်ခံပါသည်။ စနစ်သည် ပြောင်းလဲနိုင်သော မက်ဆေ့ချ်ဘုတ်များမှတဆင့် ဝန်ပိုတင်နေသော အချက်အလက်နှင့် အမည်ပျက်စာရင်းဒေတာများကို ထုတ်ဝေနိုင်ပြီး၊ ပြုပြင်ထားသော လမ်းဘေးဝန်ပိုတင်မှုရှာဖွေရေးစခန်း၏ ဆော့ဖ်ဝဲလ်မှတစ်ဆင့် စီးပွားရေးလုပ်ငန်းစဉ်များကို ဒစ်ဂျစ်တယ်စနစ်ဖြင့် စီမံခန့်ခွဲပါသည်။
ရိုးရိုးလက်ကွက်
လုပ်ဆောင်ချက်ဖော်ပြချက်
● ပင်မအဝေးပြေးလမ်းကြောကိုဖြတ်သွားသောယာဉ်များအတွက်၊ အလေးချိန်စနစ်သည် ယာဉ်၏စုစုပေါင်းအလေးချိန်၊ axle အလေးချိန်၊ axles နှင့် တာယာအရေအတွက်၊ axle အကွာအဝေး၊ ယာဉ်အရှိန်နှင့် ယာဉ်အရှိန်ကို အလိုအလျောက်သိရှိနိုင်သည်။
● အဆိုပါစနစ်သည် ယာဉ်များကို တိကျစွာ ထိရောက်စွာ ခွဲခြားနိုင်ပြီး ယာဉ်တန်းစီခြင်းနှင့် လမ်းကြောပြောင်းလဲခြင်းကဲ့သို့သော ပုံမှန်မဟုတ်သော မောင်းနှင်မှုအခြေအနေများကို ကိုင်တွယ်ဖြေရှင်းနိုင်ကာ ယာဉ်များနှင့် ဒေတာများကြား အပြန်အလှန်ဆက်သွယ်မှုကို သေချာစေသည်။
● ဤစနစ်တွင် ဒေတာပမာဏအချို့ကို သိမ်းဆည်းထားရန် အလိုအလျောက် ကြားခံလုပ်ဆောင်မှုတစ်ခု ပါရှိသည်။ လမ်းဘေးရှိ ကွန်ပြူတာသို့ ဒေတာပို့လွှတ်မှု မအောင်မြင်ပါက၊ စနစ်သည် ဒေတာကို ပြန်လည်ပေးပို့နိုင်ပြီး ဒေတာထူးခြားမှုနှင့် ခိုင်မာမှုကို သေချာစေသည်။
● အလေးချိန်အချက်အလက်ကို သတ်မှတ်ထားသော ဒေတာအင်တာဖေ့စ်မှတဆင့် နောက်ခံထိန်းချုပ်ကွန်ပျူတာသို့ ပို့နိုင်သည်။
● ဤစနစ်တွင် အမှားအယွင်းများကို ကိုယ်တိုင်စမ်းသပ်စစ်ဆေးခြင်း လုပ်ဆောင်ချက် ပါရှိပြီး စက်ပစ္စည်း သို့မဟုတ် လိုင်းချို့ယွင်းမှု ဖြစ်ပေါ်သည့်အခါ၊ စနစ်သည် သက်ဆိုင်ရာ ချို့ယွင်းချက် အချက်အလက်များကို ရယူနိုင်သည်။
● စနစ်သည် ပိုင်ရှင်မဲ့မုဒ်တွင် အနှောက်အယှက်မရှိ၊ အဆက်မပြတ်နှင့် ရာသီဥတုအားလုံး၏ လုပ်ဆောင်ချက်လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်ပါသည်။
● ရှေ့နှင့်နောက် လိုင်စင်နံပါတ်များ မကိုက်ညီသော တစ်ပိုင်းတွဲယာဉ်များအတွက်၊ စနစ်သည် ရှေ့လိုင်စင်နံပါတ်ပြားနှင့် နောက်တွဲနံပါတ်နှစ်ခုစလုံးကို ဖမ်းယူရန်အတွက် နောက်ယာဉ်ကို ဖမ်းယူသည့်စနစ်တွင် ထည့်သွင်းပေးပါသည်။
● စနစ်သည် တန်ပိုတင်ယာဉ်များ၏ မြင်ကွင်းကျယ်ပုံနှစ်ပုံကို ဖမ်းယူနိုင်သည် (ယာဉ်၏မြင်ကွင်းအပြည့်အစုံ၊ လိုင်စင်နံပါတ်ပြား၊ အရောင်၊ မော်ဒယ်နှင့် ထင်ရှားသော ပထဝီဝင်အင်္ဂါရပ်များ အပါအဝင်)။
စနစ်အစိတ်အပိုင်းများ
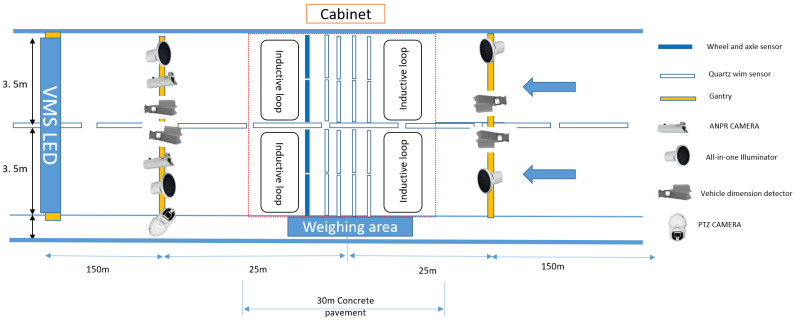
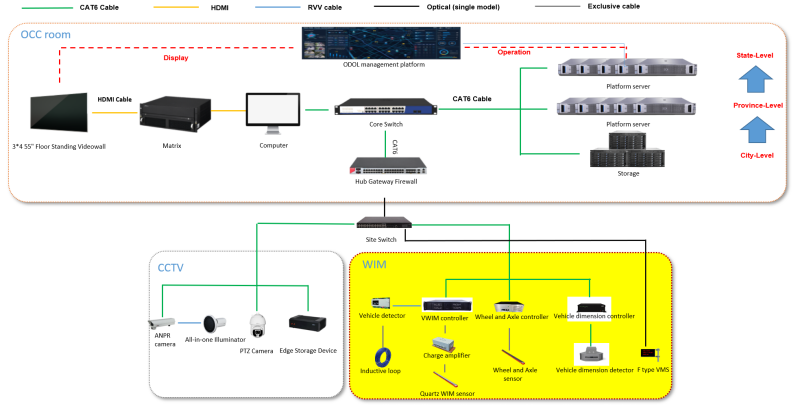
မရပ်မနား အလေးချိန်ထိန်းသည့်စနစ်တွင် အရှိန်အဟုန်မြင့်သော အလေးချိန်ချိန်ခွင်စနစ်၊ ယာဉ်ခွဲခြားမှုစနစ်၊ ယာဉ်မှတ်သားမှုစနစ်၊ လမ်းဘေးဗီဒီယိုစောင့်ကြည့်စနစ်၊ လမ်းဘေးသတင်းထုတ်ပြန်မှုစနစ်နှင့် လမ်းဘေးသတင်းအချက်အလက် ပေါင်းစပ်ထုတ်လွှင့်မှုစနစ်တို့ ပါဝင်သည်။
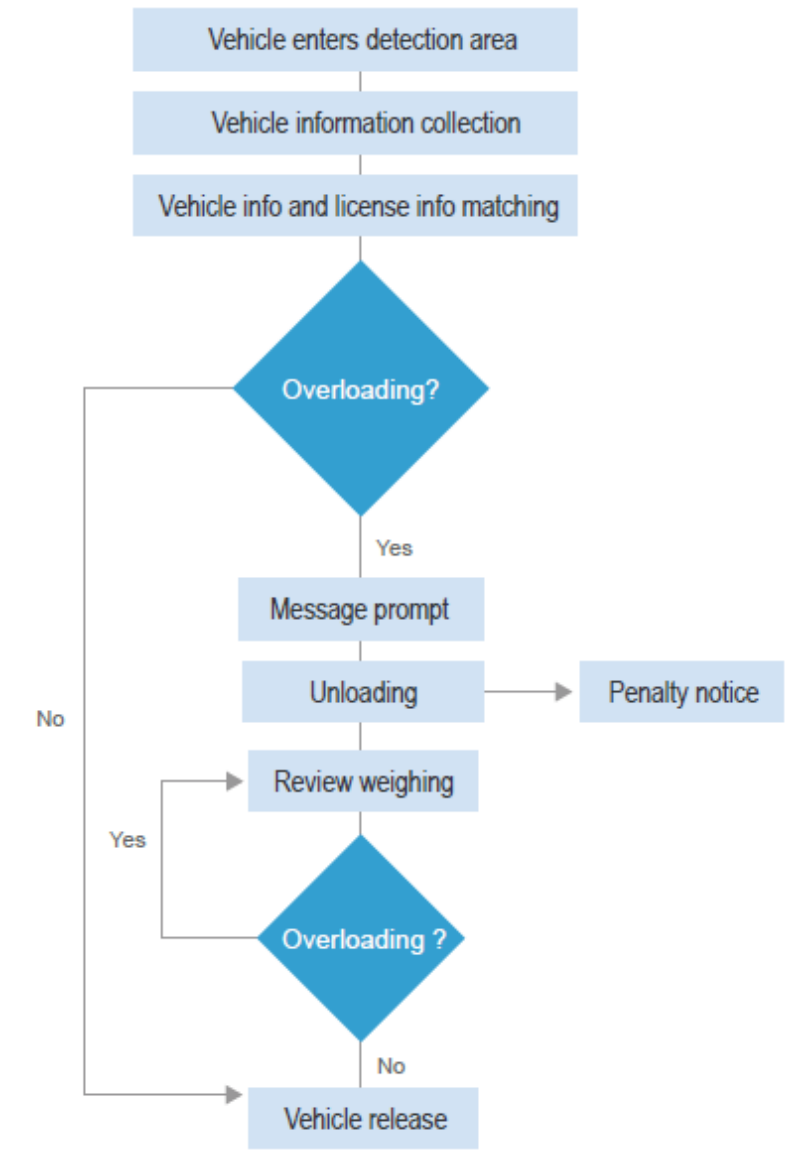
မရပ်မနား အလေးချိန် ထိန်းကျောင်းမှု လုပ်ငန်းစဉ် ပုံကြမ်း
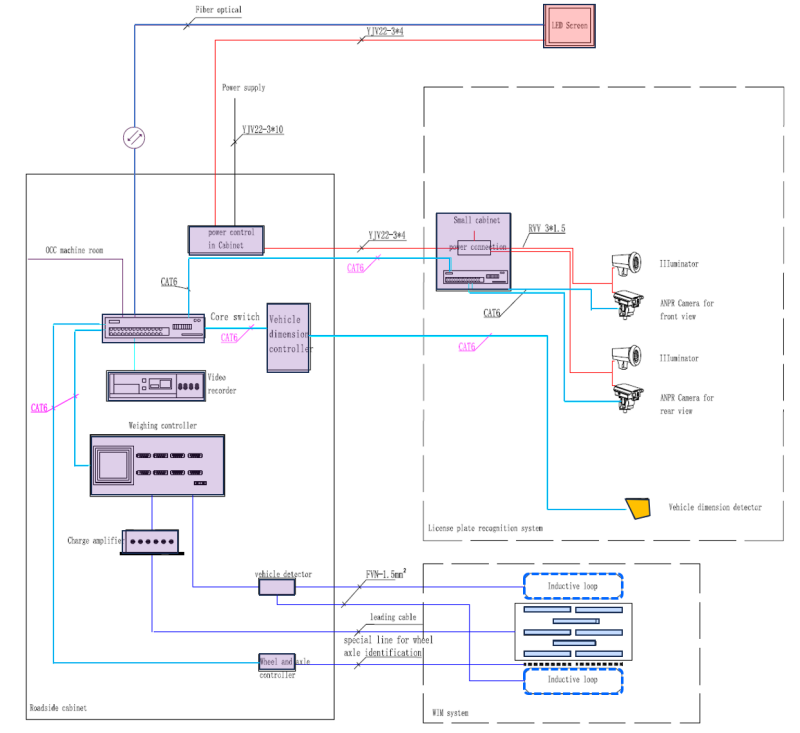
စနစ် Topology ပုံကြမ်း
ပင်မနည်းပညာဆိုင်ရာ အညွှန်းကိန်းများ
● အများဆုံး axle (သို့မဟုတ် axle အုပ်စု) ဝန်- 40,000 ကီလိုဂရမ်
● အနည်းဆုံး axle (သို့မဟုတ် axle group) ဝန်- 500 ကီလိုဂရမ်
●ဘွဲ့တန်ဖိုး- 50 ကီလိုဂရမ်
●Dynamic detection speed range- 0.5–200 km/h
● ဒိုင်းနမစ်အလေးချိန်တိကျမှုအဆင့်- အဆင့် 5
● နေ့ဘက်လိုင်စင်နံပါတ်ပြား ဖမ်းယူနှုန်း- ≥98%
● ညအချိန် လိုင်စင်နံပါတ်ပြား ဖမ်းယူနှုန်း- ≥95%
●လိုင်စင်နံပါတ်ပြား အသိအမှတ်ပြုမှုနှင့် အလေးချိန်ကိုက်ညီမှု တိကျမှု- ≥99%

Enviko Technology Co.,Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdu ရုံး- အမှတ် ၂၀၀၄၊ ယူနစ် ၁၊ အဆောက်အအုံ ၂၊ အမှတ် ၁၅၈၊ Tianfu 4th Street၊ Hi-tech Zone၊ Chengdu
ဟောင်ကောင်ရုံး- 8F၊ Cheung Wang အဆောက်အအုံ၊ 251 San Wui လမ်း၊ ဟောင်ကောင်
တင်ချိန်- စက်တင်ဘာ ၁၃-၂၀၂၄




